Poop Picking Vehicle
Problem Statement
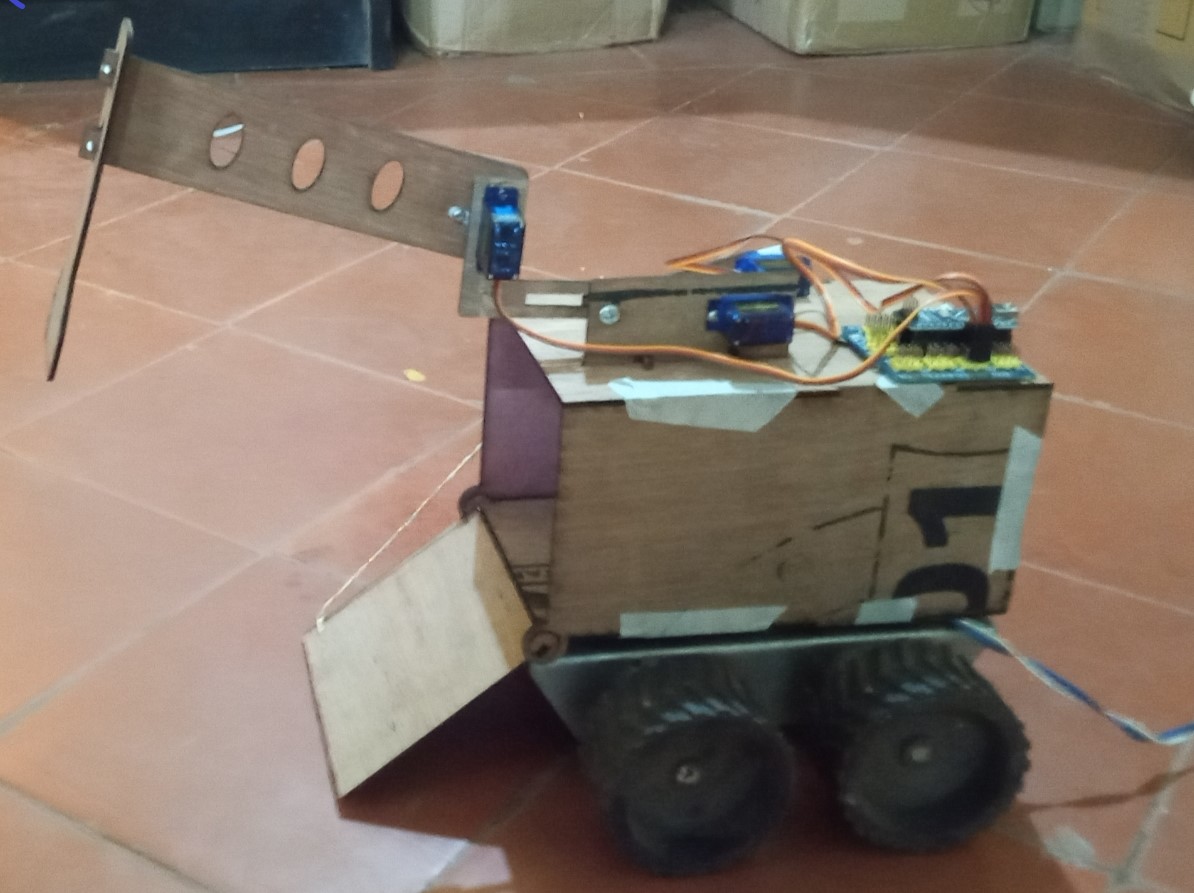
To sanitarily dispose of dog fecal matter left behind by dog walkers to promote an environment of coexistence between pet and non-pet owners.
Contributors
Kabeer Parashar
Problem Statement
To sanitarily dispose of dog fecal matter left behind by dog walkers to promote an environment of coexistence between pet and non-pet owners.
Contributors
Kabeer Parashar